
EDUCATION
- B.Eng.Chongqing University(CQU),06/2022
- M.Eng.Hong Kong University of Science and Technology (HKUST), Hong Kong, China (Present)
Project
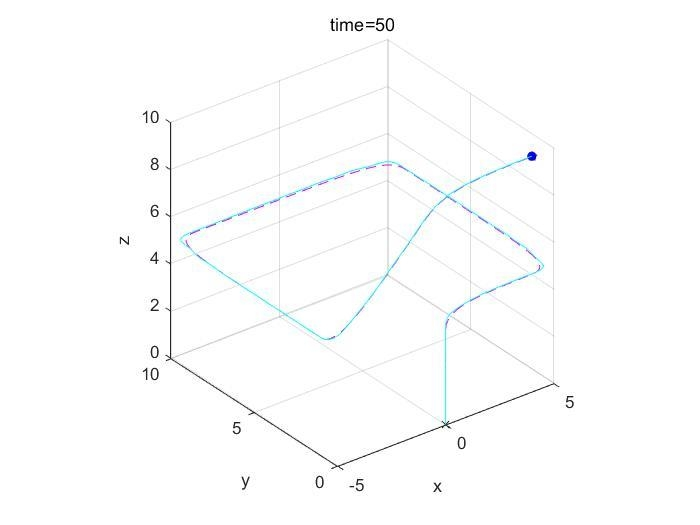
Project 1: Quadrotor Flight through Narrow Gaps with Onboard camera and an IMU(Independent Project working on)
explored the process of calling the D435i camera in ROS.
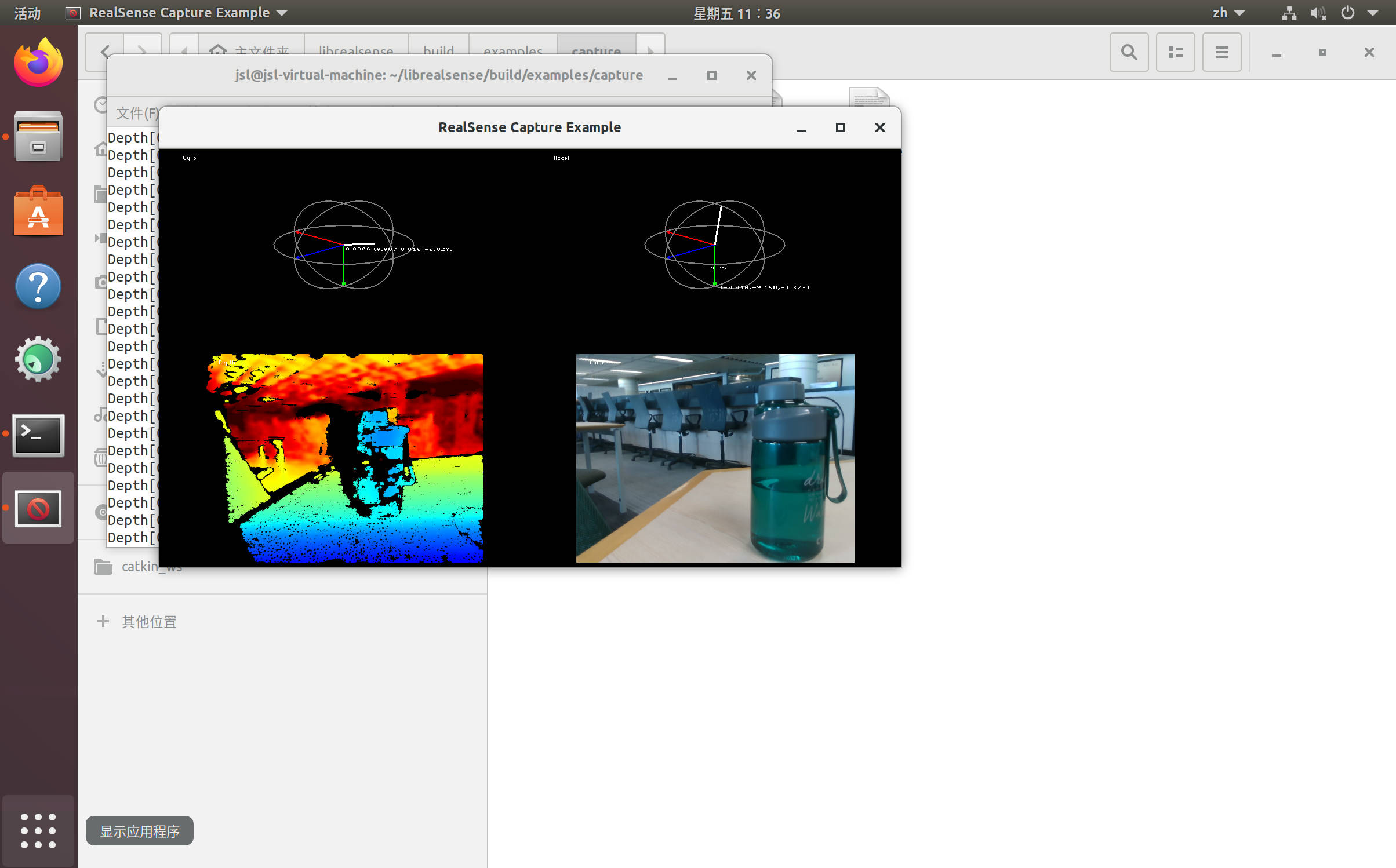
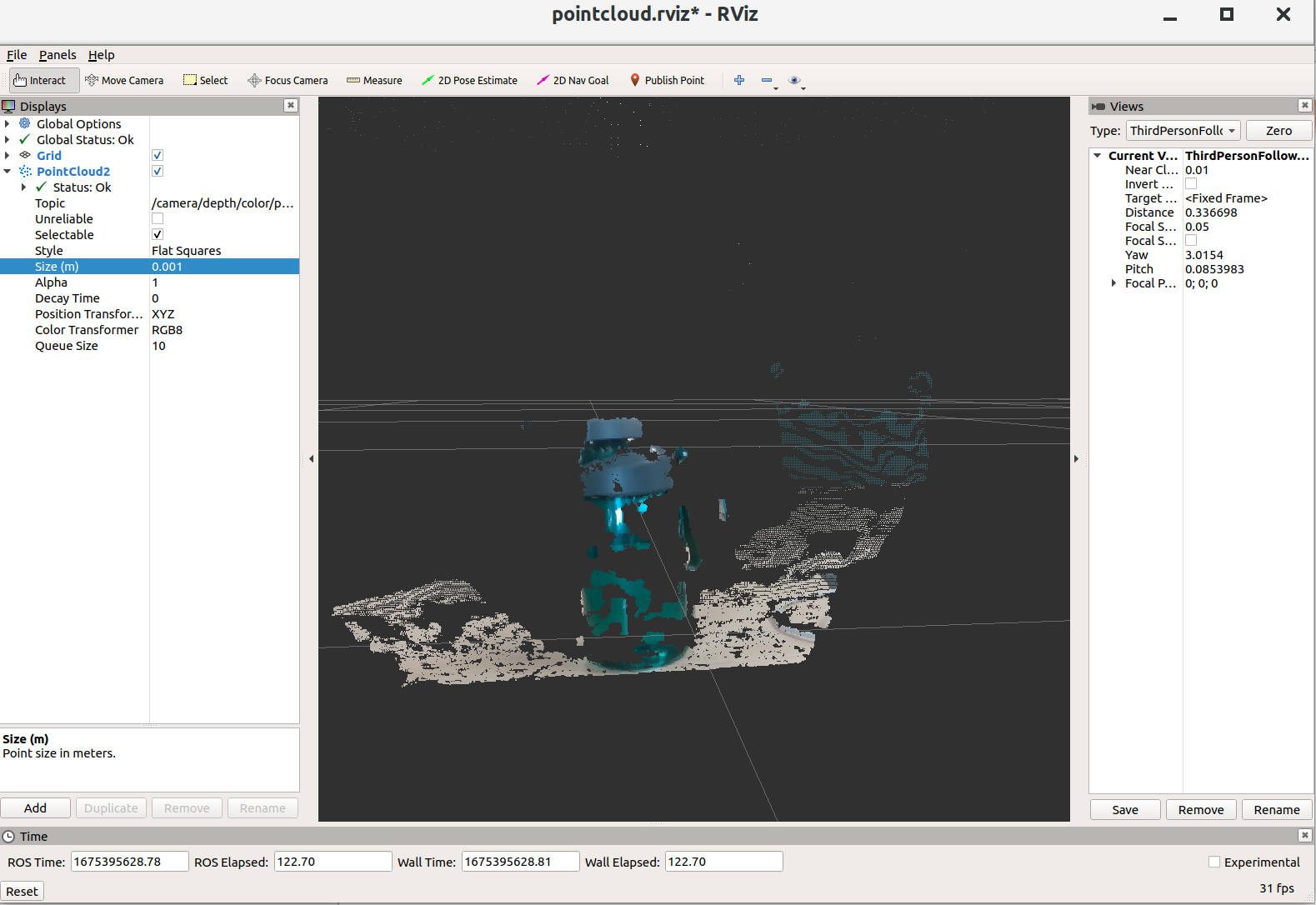
Use MSCKF (Multi-State Constraint Kalman Filter) to replay a bag file recorded by the D435i camera.
The simulation utilizes open-source codes, VINS-Fusion and EGO-Planner, and has been implemented on the XTDrone platform.
The height of the wall is 6m and the distance to the drone is about 5m. The size of the window on the wall is 2m by 2m. The size of the drone is approximately 0.5m by 0.5m by 0.3m.
The GIF images are played at a speed of 5 times faster than their original speed. The maximum speed allowed for the drone is 1m/s.
The next step is to carry out hardware deployment on drones.
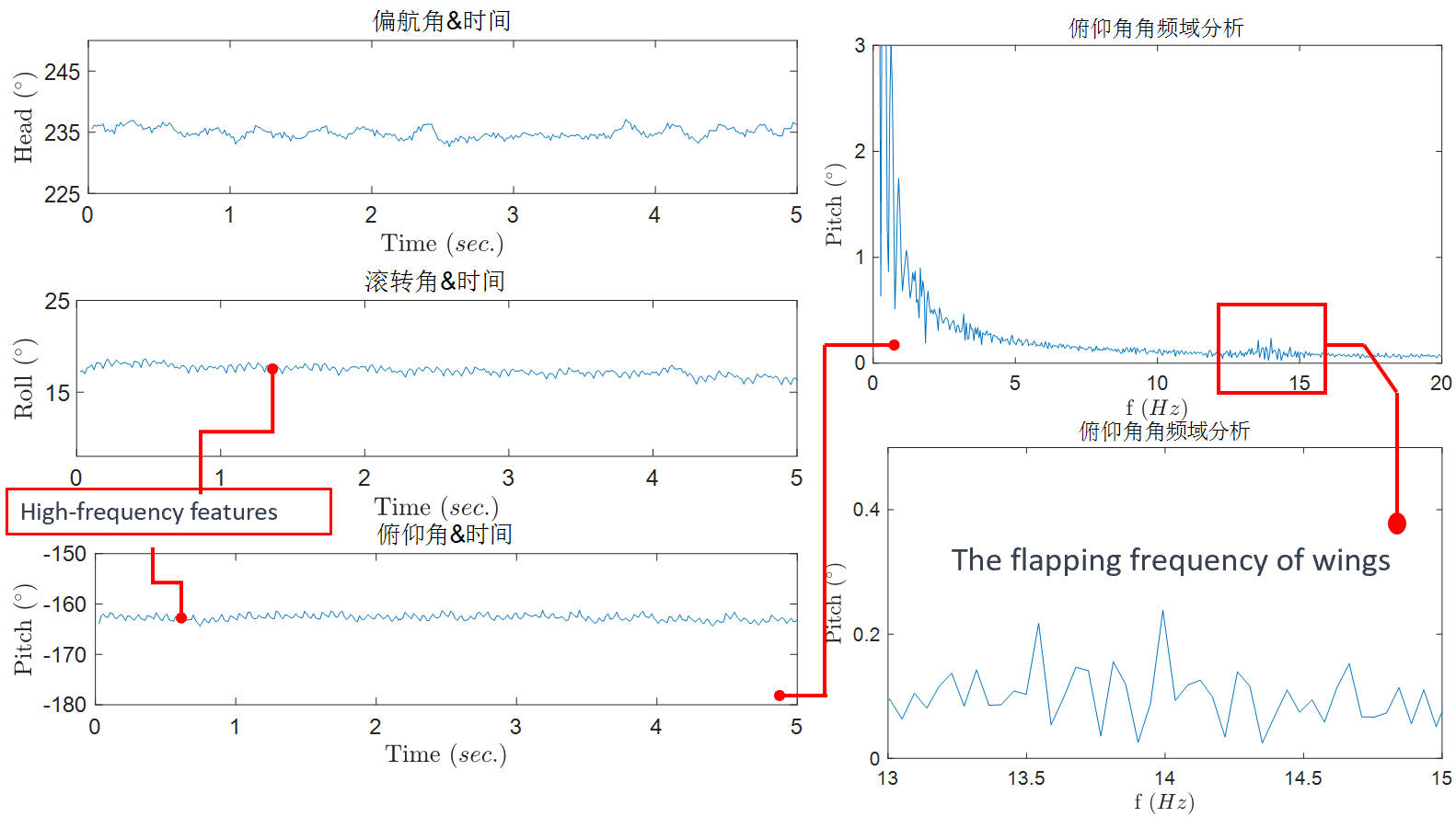
Project 2: Acquisition of inertial sensor data and attitude measurement in FWMAV flight control system
Integrated PCB for a flapping-wing drone controller with Bluetooth, MCU, and IMU
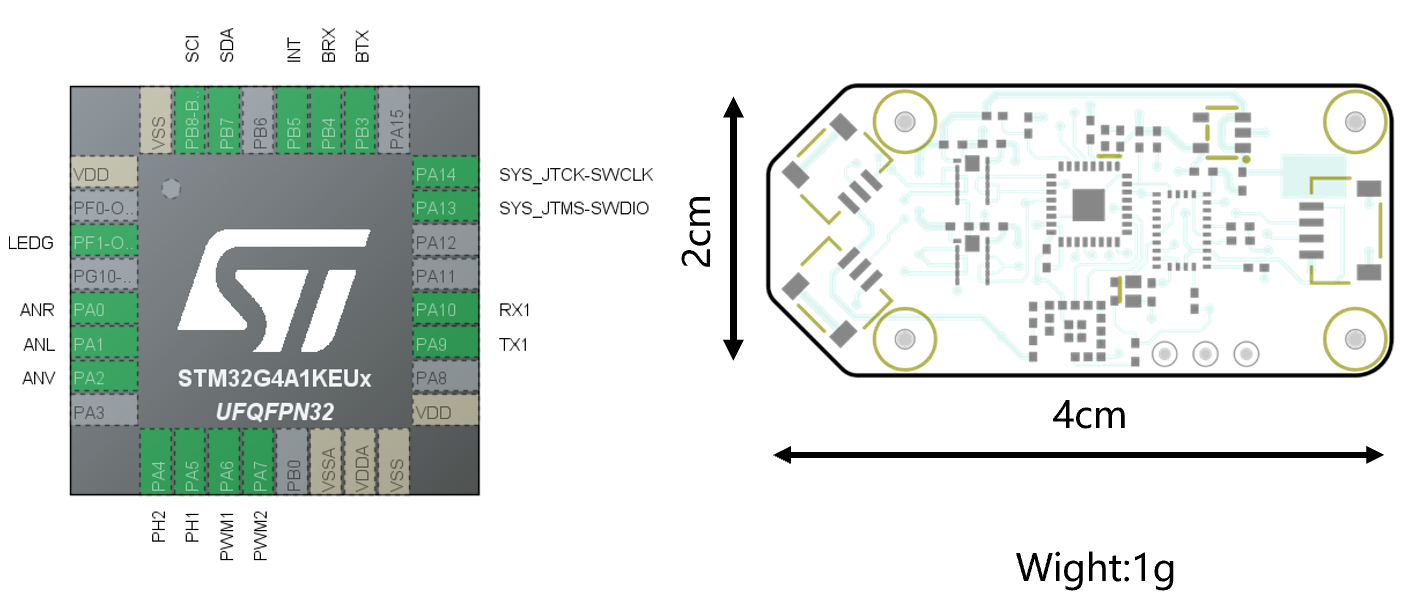
Tested the performance of the integrated controller in attitude measurement.

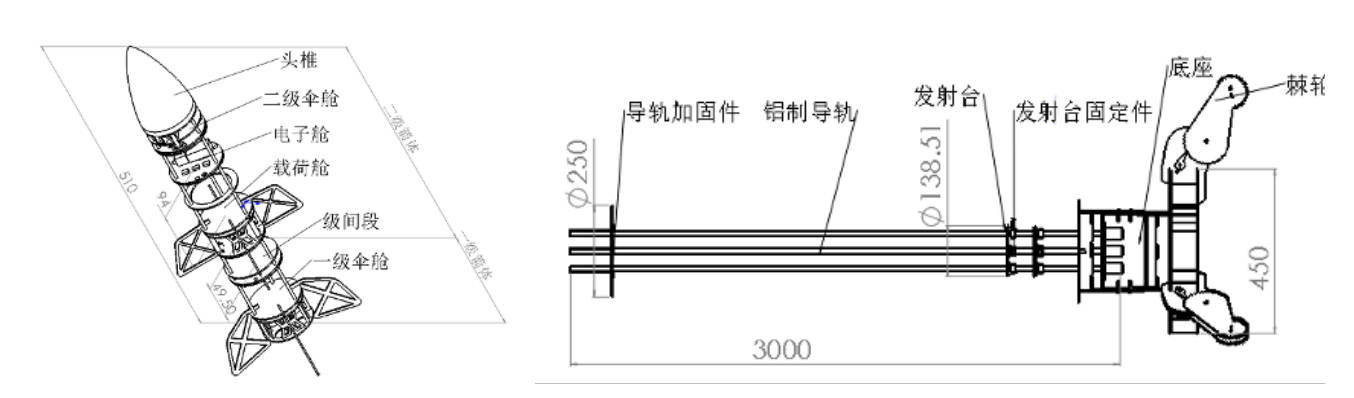
Project 3: Launch and Load Recovery of the Multistage Model Rocket
A two-stage rocket with six solid rocket motors has been designed, capable of second stage ignition. The rocket body of each stage can be recovered separately, and the electronic control system is arranged in the second stage.
Project 4:Conceptual Design of Eight-rotor Aircraft Flight
With a 15-minute hover time as a prerequisite, the designed rotary-wing unmanned aerial vehicle (UAV) needs to have the maximum possible load capacity. The flight altitude is set to 5 meters above the ground.The upper limit of the budget is 2000¥.Rflysim was used to assist us in the conceptual design and configuration selection of the drone.


EXTRACURRICULAR ACTIVITIES
Aeromodelling Team of Chongqing University
Team Leader, Project Leader of Model Rocket
Led the team members to participate in CADC competitions .
MSC (Microsoft Student Club) of Chongqing University
Chief
Organized a series of student activities.